Loading...
Searching...
No Matches
Polyhedron_3 Class Reference
polyhedron as array of planes More...
#include <region_3.h>
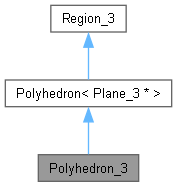
Inheritance diagram for Polyhedron_3:
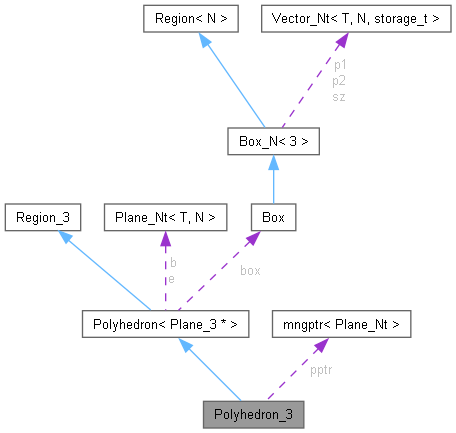
Collaboration diagram for Polyhedron_3:
Public Member Functions | |
| void | init (Plane_3 *beg, Plane_3 *end, bool managed=true) |
| the pointers must be valid for the whole lifetime of the class beg and end start and end pointers at array of planes managed: false if this array is not managed, true if this array will be delete if not used anymore | |
| template<class plane_itt > | |
| void | init (plane_itt beg, plane_itt end, bool managed) |
| this constructor copies the planes to the current class the managed flag is ignored (as if were always true) | |
| template<class plane_itt > | |
| Polyhedron_3 (plane_itt beg, plane_itt end, bool managed) | |
| this constructor copies the planes to the current class the managed flag is ignored (as if were always true) | |
| Polyhedron_3 | operator& (const Polyhedron_3 &other) const |
| Intersection of two polyhedra. | |
| virtual Region_3 * | Clone (const Vector_3 &shift=Vector_3()) const |
| void | shift (const Vector_3 &shift) |
| Shifts each plane by specified vector. Caution, in managed descendants, the function changes original planes! | |
| void | expand (vec_type dr) |
| Each plane of the polyhedron is shifted by -dr in the direction of the normal, which effectively expands the region. Negative dr shrinks the region. | |
| void | Refine () |
| Deletes redundant planes from the polyhedron. | |
| size_t | size () const |
| template<class iT > | |
| Plane_3 & | operator[] (const iT &it) |
| template<class iT > | |
| const Plane_3 & | operator[] (const iT &it) const |
 Public Member Functions inherited from Polyhedron< Plane_3 * > Public Member Functions inherited from Polyhedron< Plane_3 * > | |
| void | init (plane_it beg, plane_it end) |
| start and end iterator at plane sequence which confine the polyhedron | |
| virtual bool | TestPoint (const Vector_3 &p) const override |
| returns true if the point is in the the region plane normals are pointing inside the region!!!! | |
| vec_type | MinPlaneDist (const Vector_3 &pos, plane_it *mit=NULL) const |
| gets the distance between a point and the closest plane (which is the distance to the polyhedron surface for internal points) | |
| vec_type | TestContour (const contour_t &cnt, VecContour<> *subcont=NULL, Vector_3 *subcenter=NULL) const |
| returns the area fraction of the contour part that is inside the region and subcontour which is inside the region (if pointer is not NULL) and the center of the subcontour (if pointer is not NULL) | |
| virtual vec_type | SurfProject (const vector_t &p, vector_t *surfp=NULL, vector_t *surfn=NULL) const override |
| find polyhedron surface point surfp which is closest to the given point p and normal to polyhedron surfn at surfp Works correctly when p is inside polyhedron or outside and very close to its surface. | |
| bool | valid () const |
| vec_type | Volume () const override |
| Calculates the volume of a finite polyhedron. For void and inifinite polyhedrons returns 0. | |
| size_t | size () const |
| Public Member Functions inherited from Region< N > | |
| virtual int | GetFlags () const |
| Returns a set of bit flags specifying which functions are implemented for this region (see RegFlags). | |
| virtual bool | TestPoint (const vector_t &p) const |
| Returns true if the point is in the region. | |
| template<class contour_t > | |
| vec_type | TestContour (const contour_t &cnt, VecContour< N > *subcont=nullptr, vector_t *subcenter=nullptr) const |
| Returns the area fraction of the contour part that is inside the region, subcontour which is inside the region (if pointer is not nullptr) and the center of the subcontour (if pointer is not nullptr) | |
| virtual vec_type | TestPtrContour (const PtrContour< N > &cnt, VecContour< N > *subcont=nullptr, vector_t *subcenter=nullptr) const |
| virtual version of TestContour for particular PtrContour | |
| virtual vector_t | GetBoundingBox (vector_t *v1, vector_t *v2) const |
| Returns opposite corners of the box which contains the region inside itself. | |
| virtual vector_t | GetCenter () const |
| Returns the center of the region. | |
| virtual vec_type | GetInsideEdgePart (const vector_t &p1, const vector_t &p2) const |
| Returns a fraction of the edge [0-1] that belongs to the region. | |
| virtual vec_type | TestEdge (const vector_t &p1, const vector_t &p2, vector_t *surfp=nullptr, vector_t *surfn=nullptr) const |
| Returns a fraction of the edge from the first point till the intersection with the surface of the region. | |
| virtual vec_type | TestRay (const vector_t &p1, const vector_t &dir, vector_t *surfp=nullptr, vector_t *surfn=nullptr, vec_type epsilon=0) const |
| Returns the fraction of the ray corresponding to the nearest intersection in positive direction frac<0 means no intersection in positive direction intersections with frac<=epsilon are ignored. | |
| virtual size_t | GetElementarySubRegions (std::vector< int > *flags=nullptr, std::vector< Region * > *regs=nullptr) const |
| For composite regions returns the number of elementary subregions, otherwise returns 0. | |
Additional Inherited Members | |
| Public Types inherited from Region< N > | |
| typedef unknown_cat | category |
| Category of the region to determine the correct template behaviour for various algorithms (see Body categories categories). | |
Detailed Description
polyhedron as array of planes
Member Function Documentation
◆ Clone()
- Returns
- a copy of itself optionally shifted in space with the shift vector
Reimplemented from Polyhedron< Plane_3 * >.
◆ operator[]() [1/2]
template<class iT >
|
inline |
- Returns
- given plane by index Change of plane will change all copies of the polyhedron, use with care!
◆ operator[]() [2/2]
template<class iT >
|
inline |
- Returns
- given plane by index, const version
◆ size()
|
inline |
- Returns
- number of planes
The documentation for this class was generated from the following file: